Online publications of Lindsay Kleeman
|
INDEX:
|

Associate Professor Lindsay Kleeman
Lindsay.Kleeman[AT]monash.edu
Intelligent Robotics Research Centre
Department Electrical & Computer Systems Engineering,
Monash University, VIC 3800 AUSTRALIA
Tel : +61 3 99053491 Fax : +61 3 99053454
|
Keywords : robotics, sonar, ultrasonic, VLSI, sensing, localisation,
logic, digital, self-timed, asynchronous.
© Copyright Notice
This material is presented to ensure timely dissemination of scholarly
and technical work. Copyright and all rights therein are retained by
authors or by other copyright holders. All persons copying this
information are expected to adhere to the terms and constraints invoked
by each author's copyright. These works may not be reposted without the
explicit permission of the copyright holder. Personal use of this
material is permitted. However, permission to reprint/republish this
material for advertising or promotional purposes or for creating new
collective works for resale or redistribution to servers or lists, or
to reuse any copyrighted component of this work in other works must be
obtained from the authors and other copyright holders.
For IEEE publications, the following copyright notice
applies. © 1992-2013 IEEE. Permission to reprint/republish this
material for advertising or promotional purposes or for creating new
collective works for resale or redistribution to servers or lists, or
to reuse any copyrighted component of this work in other works must be
obtained from the IEEE.
Awards:
2017: Raymond A Jarvis Best Paper Award: Timo Stoffregen and Lindsay Kleeman, “Simultaneous
Optical Flow and Segmentation (SOFAS) using a Dynamic Vision Sensor”,
Australasian Conference Robotics and Automation (ACRA), Dec 11-13, 2017.
2017: Best Student Paper Award: Yanming Pei
and Lindsay Kleeman, “A Novel Odometry Model for Wheeled Mobile Robots
Incorporating Linear Acceleration”,
IEEE International Conference
Mechatronics and Automation Aug 6-9, 2017.
2012: Best Student Paper Award, International
Conference on Biomedical Electronics and Devices, Vilamoura Portugal Feb 2012
for paper entitled:
“Mobile, Real-Time Simulator for a Cortical Visual
Prosthesis”, by Horace Josh, Benedict Yong and Lindsay Kleeman.
2008: Award for Excellence in Physical Sciences
and Mathematics, presented to Lindsay Kleeman (and other authors) for
Springer Handbook of Robotics, American Publishers Awards, Association of
American Publishers, Inc.
2007: Best Paper Prize at the
Australasian Conference on Robotics and Automation 2007 awarded to the paper by
Alan Zhang and Lindsay Kleeman, “Robust Appearance Based Visual Route Following
in Large Scale Outdoor Environments”.
2007: Douglas Lampard Medal for the Best PhD Thesis
Dept ECSE Monash University 2006 awarded to Albert Diosi
supervised by Lindsay
Kleeman for his thesis “Laser rangefinder and advanced sonar based simultaneous
localisation and mapping for mobile robots”.
2005: Dean of
Engineering Excellence Award for Research in the Department of Electrical
and Computer Systems Engineering, Monash
University.
2000: Nakamura
prize for the best paper at International Conference
on Intelligent Robots and Systems 1999 (IROS’99)
"Fast and accurate sonar
trackers using double pulse coding" by Lindsay Kleeman
1996: Highly Commended Award at the
Engineering Excellence Awards on the 21 August. 1996
for the development of a
3D shape measurement system.
1984: IEEE Centennial Regional Student Award for
Region 10 (India, Asia, Australasia, Pacific).
One of 10 awarded internationally to
student members of the IEEE to
participate in the 1884/1984 Centennial celebrations in Boston, U.S.A.
1983: University Medal in Mathematics. University of Newcastle, Australia
Australian Computer Research Board
Postgraduate Scholarship (2 offered in Australia)
1982: Institute of Engineers
Australia Prize for the highest pass in
Bachelor of Engineering (JMC Corlett medal).
University Medal in Electrical Engineering, University of Newcastle, Australia
1980: Philosophy I Staff Prize. University of Newcastle, Australia
3rd Year Mathematics Prize. University of Newcastle, Australia
1979: BHP Prize in Electrical Engineering. University of Newcastle, Australia
2nd Year Mathematics Prize.University of Newcastle, Australia
Apollo Commemorative Prize in 2nd Year Physics.University of Newcastle, Australia
1978: Les Gibbs Prize for creative design in
Engineering I. University of Newcastle, Australia Mortimer
Temple prize in Mathematics I. University of Newcastle, Australia
Selected Papers:
Journal Papers:
- Horace Josh
and Lindsay Kleeman, “A Novel Hardware Plane Fitting Implementation and
Applications for Bionic Vision”, International Journal of Machine
Vision and
Applications, Springer, Oct 2016, Vol 27, Issue 7, pp 967-982.
- Mohammed
Ziaur Rahman, Lindsay Kleeman and AHM Ashfak Habib, “Recursive Approach
to the
Design of a Parallel Self-Timed Adder”, IEEE Transactions on Very Large
Scale
Integration (VLSI) Systems, vol.23, no.1, pp.213-217, Jan. 2015.
- Jean-Michel
Redouté, Damien Browne, David Fitrio, Arthur Lowery, Lindsay Kleeman,
“A
reduced data bandwidth integrated electrode driver for visual
intracortical
neural stimulation in high voltage CMOS”, Microelectronics Journal,
Volume 44,
Issue 4, April 2013, Pages 277–282.
- Kang
Lim Yoong,
Lindsay Kleeman and Tom Drummond, “Algorithmic methodologies for
FPGA-based
vision” International Journal of Machine Vision and
Applications,
Springer, ISSN 0932-8092 2013.
- D C
Browne and L
Kleeman, “A Sonar Ring with Continuous Matched Filtering and
Dynamically
Switched Templates”, Robotica, v 30, n 6, p 891-912, October 2012
- F Tungadi and L
Kleeman, “Autonomous Loop Exploration and SLAM with Fusion of Advanced
Sonar
and Laser Polar Scan Matching”, Robotica, Cambridge University Press
2012,
DOI:10.1017/S0263574711000348, Vol 30 Issue 01, 2012, pp 91 - 105.
- D C
Browne and L
Kleeman, “A Double Refresh Rate Sonar Ring with FPGA Based Continuous
Matched
Filtering” , Robotica, Vol 30 Issue 07 Dec 2012, pp 1051 – 1062.
- F Tungadi and
L Kleeman, “Discovering and Restoring Changes in Object Positions using
an
Autonomous Robot with Laser Rangefinders”, Robotics and Autonomous
Systems (A) vol
59 no 6 (2011) pp 428–443.
- M Ooi, E K J Sim, Y C
Kuang, L Kleeman, C. Chan and S Demidenko, “Getting More from the
Semiconductor
Test: Data Mining with Defect Cluster Extraction”, IEEE Transactions on
Instrumentation & Measurement, Vol 60 No 10, October 2011, pp
3300-3317.
- W H Li and L Kleeman,
“Segmentation and Modelling of Visually Symmetric Objects by Robot
Actions”,
IJRR (A*), Vol 30 Number 9, Aug 2011, pp1124-1142.
- A Zhang
and L Kleeman, “Robust Appearance Based
Visual Route Following for Navigation in Large Scale Outdoor
Environments”, International Journal Robotics Research, Vol. 28,
No. 3, 331-356, March 2009 DOI: 10.1177/0278364908098412.
- M Z Rahman and L Kleeman, “Paired Measurement
Localization: A Robust Approach for Wireless Localization”,
IEEE Transactions on Mobile Computing 2009.
- W H Li, A M Zhang and L Kleeman “Bilateral Symmetry
Detection for Real-time Robotics Applications”, International
Journal Robotics Research, Vol. 27, No. 7, July 2008, pp.
785–814. DOI: 10.1177/0278364908092131.
- A Diosi and L Kleeman, “Fast Laser Scan Matching
using Polar Coordinates”, International Journal Robotics
Research, Vol 26, No. 10, Oct 2007, pp 1125-1153.
- R L Stewart, R A Russell and L Kleeman, “Modelling a
Deposition Process in Collective Construction”, ELEKTRIK journal,
Special issue on swarm robotics, Vol 15, No. 2, 2007, pp 227-255.
- S. Fazli and L. Kleeman "Sensor Design and
Signal Processing for an Advanced Sonar Ring", Robotica,
Volume 24, Issue 04, July 2006, pp 433-446..
- S. Fazli and L. Kleeman, "Simultaneous Landmark
Classification, Localisation and Map Building for an Advanced Sonar Ring", Robotica
2006.
- G. Taylor and L. Kleeman, "Stereoscopic Light Stripe
Scanning: Interference Rejection, Error Minimization and Calibration",
International Journal Robotics Research, Vol 23 No 12, Dec 2004, pp
1141-1156. multimedia
extensions
- L. Kleeman, "Advanced
sonar with velocity compensation", International Journal
Robotics Research, Vol 23 No 2. Feb 2004, pp 111-126.
- R. A. Russell, G. Taylor, L. Kleeman and Anies
Purnamadjaja, "Humanoid
Robot Sensor Synergies", International Journal of Humanoid
Robotics, Vol. 1, No. 2 2004, pp. 289-314.
- K S Chong and L. Kleeman, ”Feature-based
mapping in real, large scale environments using an ultrasonic array”,
International Journal Robotics Research, Vol 18, No.
1, Jan 1999, pp. 3-19 PDF
version.
- K S Chong and L. Kleeman, "Mobile
robot map building for an advanced sonar array and accurate odometry",
International Journal Robotics Research. Vol 18, No. 1, Jan 1999, pp.
20-36.
- L. Kleeman and R. Kuc, "Mobile
robot sonar for target localization and classification",
International Journal of Robotics Research, Volume 14, Number 4, August
1995, pp 295-318. PDF version
- L. Kleeman, “Real
time mobile robot sonar with interference rejection”, Sensor
Review Vol 19, No. 3, 1999, pp. 214-221. PDF
version.
- L.Kleeman "The
jitter model for metastability and its application to redundant
synchronizers", IEEE Trans. Computers, Vol. 39, No. 7, pp.
930 - 942, July 1990.
- L.Kleeman and A.Cantoni "Metastable
behaviour in digital systems", IEEE Design and Test of Computers",
Volume 4, No. 6, pp 4-19, December, 1987.
Conference Papers:
- Timo Stoffregen and Lindsay Kleeman, “Simultaneous
Optical Flow and
Segmentation
(SOFAS) using Dynamic Vision Sensor”, Australasian Conference Robotics
and
Automation (ACRA), 2017. winner
of Best Student Paper Award.
-
Joshua Weberruss, Lindsay Kleeman, David Boland and Tom Drummond, “FPGA
Acceleration of Multilevel ORB Feature Extraction for Computer Vision”,
International Conference on Field-Programmable Logic and Applications,
FPL 2017.
-
Yanming Pei and Lindsay Kleeman, “A Novel Odometry Model for Wheeled
Mobile Robots Incorporating Linear Acceleration”, IEEE International
Conference Mechatronics and Automation Aug 6-9, 2017. winner
of Best Student Paper Award.
- Yanming Pei and Lindsay Kleeman, “Mobile Robot Floor
Classification using Motor Current and Accelerometer
Measurements”, IEEE 14th International Workshop
on Advanced Motion Control (AMC16) Auckland, New Zealand 22-24 April
2016.
- Joshua Weberruss, Lindsay Kleeman and Tom Drummond,
“ORB
Feature Extraction and Matching in Hardware”, Australasian Conference
Robotics and Automation (ACRA), Canberra 2015.
- Yanming Pei and
Lindsay Kleeman, “Online Robot Odometry Calibration over Multiple
Regions Classified by Floor Colour”, IEEE International Conference
Mechatronics and Automation (ICMA) 2015 pp. 2589 - 2596, 2015.
- Yanming
Pei and Lindsay Kleeman, “Robot Calibration of Sensor Poses and Region
Based Odometry Using Offline Optimisation of Map Information”, IEEE
International Conference Information and Automation (ICIA) 2015, pp:
462 - 468, 2015. Finalist
of best paper award.
- Horace Josh, Collette
Mann, Lindsay Kleeman and Wen Lik Dennis Lui, “Psychophysics Testing of
Bionic
Vision Image Processing Algorithms Using an FPGA Hatpack”, accepted for
presentation ICIP 2013.
- Wen Lik
Dennis Lui,
Damien Browne, Lindsay Kleeman, Tom Drummond and Wai Ho Li,
“Transformative
Reality: Improving bionic vision with robotic sensing”, 34th Annual
International IEEE EMBS Conference, San Diego, USA Aug 2012.
- H Josh, B Yong and L Kleeman,
“Mobile, Real-time Simulator for a Cortical Visual Prosthesis”,
BIODEVICES 2012
- Proceedings of the International Conference on Biomedical Electronics
and
Devices, p 37-46, Feb 2012, winner
of Best Student Paper Award.
- H Josh, B Yong and L
Kleeman, “A Real-time FPGA-based Vision System for a Bionic Eye”, ACRA 2011, Monash
University, Melbourne
Australia, Dec 7-9 2011, pp 1-8.
- Wen Lik Dennis Lui,
Damien Browne, Lindsay Kleeman, Tom Drummond and Wai Ho Li,
"Transformative Reality: Augmented Reality for Visual Prostheses",
IEEE International Symposium on Mixed and Augmented Reality (ISMAR),
Basel,
Switzerland, 26-29 October 2011, pp. 253-254. ISBN 978-1-4577-2183-0
- F
Tungadi, W L Lui, L
Kleeman and R A Jarvis, “Robust Online Map Merging System using Laser
Scan
Matching and Omnidirectional Vision”, IROS 2010. IEEE/RSJ International
Conference on Intelligent Robots and Systems, Taipei, Taiwan
October 18-22, 2010.
- M
Ooi, E K J Sim, Y C
Kuang, L Kleeman, C. Chan and S Demidenko “Automatic Defect Cluster
Extraction
for Semiconductor Wafers”, I2MTC2010 IEEE International Instrumentation
and
Measurement Technology Conference, Austin TX USA, May 3-6 2010, pp.1024 - 1029
- M
Ooi,
C Chan, W J Tee, Y C Kuang, L Kleeman, S Demidenko, “Fast and Accurate
Automatic Defect Cluster Extraction for Semiconductor Wafers”, The 5th IEEE International
Symposium on Electronic
Design, Test & Applications (DELTA 2010), Ho Chi Minh City,
Vietnam,
January 13-15, 2010, pp. 276 - 280
- D Browne and L
Kleeman, “An
Advanced Sonar Ring Design with 48 Channels of Continuous Echo
Processing using Matched Filters”, IROS 2009, St. Louis,
Missouri, USA.
- W H Li and L Kleeman,
“Interactive
Learning of Visually Symmetric Objects”, IROS 2009, St.
Louis, Missouri, USA.
- F Tungadi and L
Kleeman, “Loop
Exploration for SLAM with Fusion of Advanced Sonar Features and Laser
Polar Scan Matching”, IROS 2009, St. Louis, Missouri, USA.
- F Tungadi and L
Kleeman, “Time
Synchronisation and Calibration of Odometry and Range Sensors for
High-Speed Mobile Robot Mapping”, ACRA 2008, Canberra.
- W H Li and L Kleeman,
“Autonomous
Segmentation of Near-Symmetric Objects through Vision and Robotic
Nudging” IROS, Nice France, September 2008, pp 3604-3609.
- M Z Rahman and L
Kleeman,
“Self-Localization Schemes for Geographic Routing in Wireless
Sensor Networks” 2008 IEEE 67th Vehicular Technology
Conference: VTC2008-Spring 11–14 May 2008, Marina Bay,
Singapore pp 71-75.
- A Zhang and L
Kleeman, “Robust
Appearance Based Visual Route Following in Large Scale Outdoor
Environments”, ACRA 2007, Brisbane. Winner
best student paper award.
- F Tungadi and L
Kleeman, “Multiple Laser Polar Scan Matching with application to SLAM”,
ACRA 2007, Brisbane.
- L Kornienko and L
Kleeman, “An
Autonomous Human Body Parts Detector Using A Laser Range-Finder”,
ACRA 2007, Brisbane.
- P Chakravarty, A
Zhang, R Jarvis and L
Kleeman. “Anomaly Detection and Tracking for a Patrolling
Robot”, ACRA 2007, Brisbane.
- W H Li and L Kleeman,
“Real Time
Object Tracking using Reflectional Symmetry and Motion”,
Proceedings IEEE/RSJ International Conference on Intelligent Robots and
Systems 2006, pp 2798- 2803.
- W H Li, A M Zhang and
L Kleeman,
“Real Time Detection and Segmentation of Reflectionally Symmetric
Objects in Digital Images”, Proceedings IEEE/RSJ International
Conference on Intelligent Robots and Systems 2006, pp 4867-4873.
- A M Zhang and L
Kleeman,
“Topological Mapping Inspired by Techniques in DNA Sequence
Alignment”, Proceedings IEEE/RSJ International Conference on
Intelligent Robots and Systems 2006, pp 2754-2759.
- L Kleeman and A Ohya,
“The Design
of a Transmitter with a Parabolic Conical Reflector for a Sonar
Ring”, Australasian Conference on Robotics and Automation, Dec
2006, Auckland New Zealand.
- A Zhang and L
Kleeman, “A
Panoramic Color Vision System for Following Ill-Structured
Roads”, Australasian Conference on Robotics and Automation, Dec
2006, Auckland New Zealand.
- W H Li and L Kleeman,
“Fast Stereo
Triangulation using Symmetry”, Australasian Conference on
Robotics and Automation, Dec 2006, Auckland New Zealand.
- W H Li, A M Zhang and L Kleeman, "Real Time Detection and Segmentation
of Reflectionally Symmetric Objects in Digital Images",
Proceedings 2006 IEEE/RSJ International Conference on Intelligent
Robots and Systems, IROS 2006.
- W H Li and L Kleeman, "Real
Time Object Tracking using Reflectional Symmetry and Motion",
Proceedings 2006 IEEE/RSJ International Conference on Intelligent
Robots and Systems, IROS 2006.
- A M Zhang and L Kleeman, "Topological
Mapping Inspired by Techniques in DNA Sequence Alignment",
Proceedings 2006 IEEE/RSJ International Conference on Intelligent
Robots and Systems, IROS 2006.
- W H Li, A M Zhang and L Kleeman, "Fast Global Reflectional Symmetry
Detection for Robotic Grasping and Visual Tracking"
Australasian Conference on Robotics and Automation, Dec 2005, Sydney,
Australia
- A Diosi and L Kleeman, "Laser Scan Matching in Polar
Coordinates with Application to SLAM", Proceedings IEEE/RSJ
International Conference on Intelligent Robots and Systems 2005, pp
1439-1444.
- A Diosi, G Taylor and L Kleeman, "Interactive SLAM using
Laser and Advanced Sonar", Proceedings of the 2005 IEEE
International Conference on Robotics and Automation Barcelona, Spain,
April 2005, pp 1115-1120.
- G Taylor and L Kleeman, "A Multiple Hypothesis Walking
Person Tracker with Switched Dynamic Model", Proceedings of
the Australasian Conference on Robotics and Automation, Dec 2004,
Canberra, Australia. Video
- S Fazli and L Kleeman, "A
Low Sample Rate Real Time Advanced Sonar Ring", Proceedings
of the Australasian Conference on Robotics and Automation, Dec 2004,
Canberra, Australia.
- G. Taylor and L. Kleeman, "Integration
of Robust Visual Perception and Control for a Domestic Humanoid Robot",
Proceedings 2004 IEEE/RSJ International Conference on Intelligent
Robots and Systems IROS2004, Sendai Japan pp1010-1015.
- A. Diosi and L. Kleeman, "Advanced
Sonar and Laser Range Finder Fusion for Simultaneous Localization and
Mapping", Proceedings 2004 IEEE/RSJ International Conference
on Intelligent Robots and Systems IROS2004, Sendai Japan pp 1854-1859.
- S. Fazli and L. Kleeman, "A
Real Time Advanced Sonar Ring with Simultaneous Firing",
Proceedings 2004 IEEE/RSJ International Conference on Intelligent
Robots and Systems IROS2004, Sendai Japan, pp. 1872-1877.
- G. Taylor and L. Kleeman, "Hybrid
Position-Based Visual Servoing with Online Calibration for a Humanoid
Robot", Proceedings 2004 IEEE/RSJ International Conference on
Intelligent Robots and Systems IROS2004, Sendai Japan pp 686-691.
- G. Taylor and L. Kleeman, "Fusion
of Multimodal Visual Cues for Model-Based Object Tracking",
Australiasian Conference on Robotics and Automation, Brisbane Dec 2003.
- A Diosi and L. Kleeman, "Uncertainty
of Line Segments Extracted from Static SICK PLS Laser",
Australiasian Conference on Robotics and Automation Brisbane Dec 2003.
- G. Taylor and L. Kleeman, "Robust
Range Data Segmentation Using Geometric Primitives for Robotic
Applications", Proceedings of the 5th IASTED International
Conference on Signal and Image Processing August 13-15, Honolulu,
Hawaii 2003, pp 467-472.
- L. Kleeman, "Advanced
Sonar and Odometry Error Modeling for Simultaneous Localisation and Map
Building" Proceedings of the IEEE/RSJ International
Conference on Intelligent Robots and Systems, Las Vegas 2003, pp
699-704.
- G. Taylor and L. Kleeman, "Grasping unknown objects with a
humanoid robot", Proceedings 2002 Australiasian Conference on
Robotics and Automation Aukland 27-29 November 2002, pp. 191-196. VRML data
available (low
resolution 34k, medium
resolution 1.5M, high
resolution 6.1M) of laser stripe 3D data.
- L. Kleeman, "On-the-fly
classifying sonar with accurate range and bearing estimation"
IEEE/RSJ International Conference on Intelligent Robots and Systems,
2002, pp.178-183.
- G. Taylor, L. Kleeman and Å. Wernersson, "Robust colour and range sensing for robotic
applications using a stereoscopic light stripe scanner",
IEEE/RSJ International Conference on Intelligent Robots and Systems,
2002, pp. 86-91. VRML
data available (low
resolution 34k, medium
resolution 1.5M, high
resolution 6.1M) of laser stripe 3D data.
- A. Heale and L. Kleeman, "Fast
target classification using sonar" IEEE/RSJ International
Conference on Intelligent Robots and Systems, Hawaii, USA October 2001,
p 1446-1451.
- G. Taylor and L. Kleeman, "Flexible
self-calibrated visual servoing for a humanoid robot"
Proceedings of the Australian Conference on Robotics and Austomation
2001, Sydney November 2001. pp 79-84.
- A. Heale and L. Kleeman, "A
real time DSP sonar echo processor", IEEE/RSJ International
Conference on Intelligent Robots and Systems, Takamatsu, Japan, October
2000, pp 1261-1266. Conference presentation here.
- A. Heale and L. Kleeman, "A Sonar Sensor with Random
Double Pulse Coding", Australian Conference on Robotics and
Automation, Melbourne, August 30 - September 1, 2000, pp 81-86.
- R. A. Russell, L. Kleeman, S. Kennedy "Using volatile chemicals to help locate
targets in complex environments", Australian Conference on
Robotics and Automation, Melbourne, August 30 - September 1, 2000, pp
87-92.
- A. Price, G. Taylor and L. Kleeman, "Fast, robust colour vision for the
monash humanoid", Australian Conference on Robotics and
Automation, Melbourne, August 30 - September 1, 2000, pp 141-146.
- L. Kleeman, "Fast
and accurate sonar trackers using double pulse coding",
IEEE/RSJ International Conference on Intelligent Robots and Systems,
Kyongju, Korea, October 1999, pp.1185-1190. (winner
of the Nakamura best paper award IROS'99).
- K S Chong and L. Kleeman “Large
Scale Sonarray Mapping using Multiple Connected Local Maps”,
International Conference on Field and Service Robotics, ANU December
8-10, 1997, pp. 538-545.
- K S Chong and L Kleeman, "Accurate
odometry and error modelling for a mobile robot", IEEE
International Conference on Robotics and Automation, Albuquerque USA,
April 1997, pp. 2783-2788.
- L Kleeman, "Scanned
monocular sonar and the doorway problem", IEEE/RSJ
International Conference on Intelligent Robots and Systems, Osaka,
November 1996, pp 96-103.
- H. Akbarally and L. Kleeman, "3D
robot sensing from sonar and vision", IEEE International
Conference on Robotics and Automation 1996, Minneapolis, Minnesota,
April 1996 pp. 686-691.
- H. Akbarally and L. Kleeman, "A
sonar sensor for accurate 3D target localisation and classification",
IEEE International Conference on Robotics and Automation 1995, Nagoya,
Japan, May 1995 pp. 3003-3008.
- L.Kleeman, "Optimal
estimation of position and heading for mobile robots using ultrasonic
beacons and dead-reckoning", IEEE International Conference on
Robotics and Automation, Nice, France, pp 2582-2587, May 10-15 1992.
- L. Kleeman, "Understanding
and applying Kalman filtering", Proceedings of the Second
Workshop on"Perceptive Systems" Jan 25, 26 1996, Curtin University of
Technology, Perth Western Australia
- C.Y.Chung and L.Kleeman, "Metastable-robust
self-timed circuit synthesis from live safe simple signal transition
graphs", Proceedings of the International Symposium on
Advanced Research in Asynchronous Circuits and Systems, Salt Lake City,
Utah USA Nov 3-5 1994, pp 97-105.
- L.Kleeman, "Iterative
algorithm for three dimensional autonomous robot localisation",
Third National Conference on Robotics, Melbourne pp. 210 - 219 June
1990.
- L.Kleeman, "Ultrasonic
autonomous robot localisation system", IEEE international
conference Intelligent Robots and Systems '89 Tsukuba, Japan,
pp.212-219 September 1989.
- L.Kleeman and A.Cantoni, "The modelling and
performance analysis of batching arbiters", Joint Performance
'86 and ACM SIGMETRICS 1986 Conference, North Carolina State
University, USA pp 35-43, May 1986.
Well Cited
Papers:
For current citations see Google
Scholar Profile Lindsay Kleeman
Books
- Geoffrey Taylor and Lindsay Kleeman, Visual
Perception and Robotic Manipulation: 3D Object Recognition, Tracking
and Hand-eye Coordination, Springer Tracts in Advanced
Robotics (STAR), Vol 26 2006, ISBN: 3-540-33454-8, 218 pages + CD-ROM, buy
it
-
L.Kleeman and
R. Kuc, Chapter 21: “Sonar Sensing” in Springer
Handbook of Robotics, Editors Bruno Siciliano and Oussame
Khatib, ISBN
978-3-540-23957-4, Springer-Verlag Berlin Heidelberg 2008, pp 491-519. This handbook won
two Professional and
Scholarly Excellence (The PROSE Awards) awards in 2008
from the Professional
and Scholarly Publishing (PSP) Division of the Association of American
Publishers (AAP).
Software
Videos:
- DSP sonar tracking a moving plane: MPEGS: Low
resolution (1 Mbyte) Medium
(4 Mbyte)
- Two DSP sonar sensors tracking the same wall on a
moving robot - demonstration of interference rejection whilst
classifying the wall as a plane. MPEGS: Low
resolution (1 Mbyte) Medium
(4 Mbyte)
- Wiped sonar map building under joystick control.
MPEGS: Low
resolution (1 Mbyte) Medium
(4 Mbyte)
- Autonomous exploration and sonar mapping. MPEGS: Low
resolution (1 Mbyte) Medium
(4 Mbyte)
- SLAM evolution of map building from sonar and laser:
GIF: short (208
kbytes), long zoomed (2.2
Mbyte)
- Interactive SLAM AVI: long (22 Mbytes)
- for details see: A Diosi, G Taylor and L Kleeman, "Interactive SLAM using
Laser and Advanced Sonar", Proceedings of the 2005 IEEE
International Conference on Robotics and Automation Barcelona, Spain,
April 2005, pp 1115-1120.
- Robot manipulation and sensing videos from PhD
student Geoff Taylor here
Online Theses:
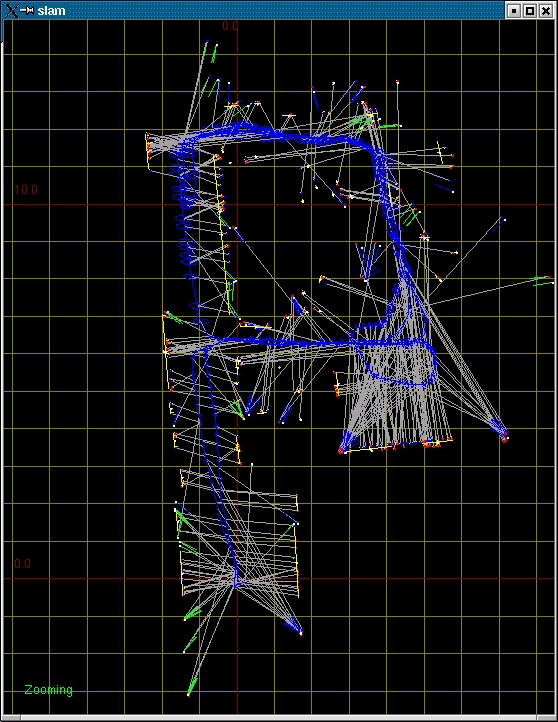
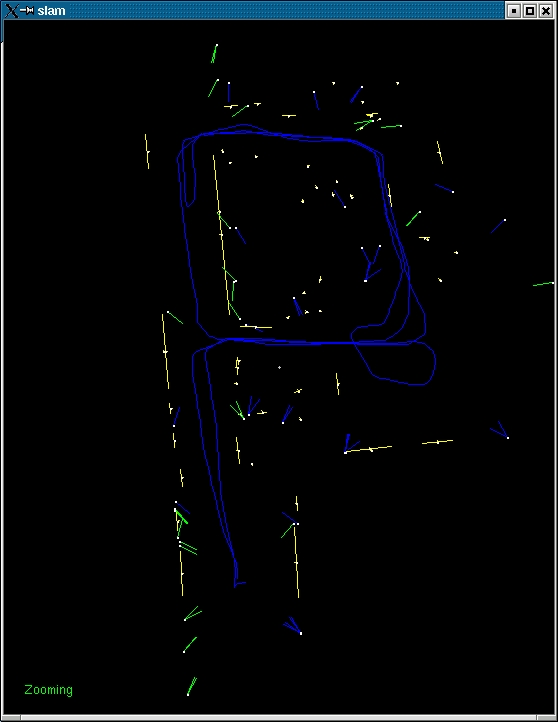
Sonar SLAM
(Simultaneous Localisation and Mapping) Map with Loops (jpg):
- Map built using a robot running SLAM Extended Kalman
Filtering from on-the-fly front and back sonar measurements during a
wiping action. Yellow are features classified as a plane by the sonar,
blue corners and green edges. Map
with all measurements on 1 metre grid, final
feature map. The robot path and error ellipses are shown in
blue.
Seminars in
powerpoint format:
Technical
Reports Frequently Requested:
K S Chong and L. Kleeman "Precise
odometry and statistical error modelling for a mobile robot",
Technical report MECSE-96-6, Department of Electrical and Computer
Systems Engg., Monash University 1996. Here is the conference presentation.
L. Kleeman "Odometry
Error Covariance Estimation for Two Wheel Robot Vehicles",
Technical report MECSE-95-1, Department of Electrical and Computer
Systems Engg., Monash University 1995.
Other technical reports are available here: http://www.ds.eng.monash.edu.au/techrep/reports/
Archive
of Zipped Postcript Papers:
- Chong, K.S. and Kleeman, L. "Indoor
Exploration using a Sonar Sensor Array: A Dual Representation Strategy",
1997 IEEE/RSJ International Conference on Intelligent Robots and
Systems. (recommended for best paper award by a referee)
- Chong, K.S. and Kleeman, L. "Sonar
Feature Map Building for a Mobile Robot", Proceedings 1997
IEEE International Conference on Robotics and Automation.
- Chong, K.S. and Kleeman, L. "Accurate
Odometry and Error Modelling for a Mobile Robot", Proceedings
1997 IEEE International Conference on Robotics and Automation.
- L Kleeman, "Scanned
monocular sonar and the doorway problem", accepted to
IEEE/RSJ International Conference on Intelligent Robots and Systems
1996. (recommended for best paper award by a referee)
- H. Akbarally and L. Kleeman, "3D
robot sensing from sonar and vision", accepted to IEEE
International Conference on Robotics and Automation 1996, Minneapolis -
recommended for best student paper prize by a referee.
- L. Kleeman and R. Kuc, "Mobile
robot sonar for target localization and classification",
International Journal of Robotics Research, Volume 14, Number 4, August
1995, pp 295-318.
- C. Y. Chung and L. Kleeman, "Avoiding
hazards in self-timed digital circuits derived from signal transition
graphs", Australian Telecommunications Review, Vol. 29, No.
1, pp. 25-38, 1995.
- L. Kleeman, "A three
dimensional localiser for autonomous robot vehicles",
Robotica, Vol 13, No 1 pp 87-94, 1995.
- H. Akbarally and L. Kleeman, "Sensor
data fusion of sonar and visual data", Australian Robot
Association conference "Robots for Australian Industries" Melbourne
July 1995, pp. 288-305.
- H. Akbarally and L. Kleeman, "A
sonar sensor for accurate 3D target localisation and classification",
IEEE International Conference on Robotics and Automation 1995, Nagoya,
Japan, May 1995 pp. 3003-3008.
- M.L.Hong and L. Kleeman, "A
low sample rate 3D sonar sensor for mobile robots", IEEE
International Conference on Robotics and Automation 1995, Nagoya,
Japan, May 1995 pp. 3015-3020.
- L.Kleeman and R.Kuc, "An
optimal sonar array for target localization and classification",
IEEE International Conference on Robotics and Automation, San Diego
USA, May 1994 pp 3130-3135.
- C. Y. Chung and L. Kleeman, "An
optimal approach to implementing self-timed logic circuits from signal
transition graphs", Australian Telecommunications Review, Vol
27, No. 2, pp. 41-56, 1993.
- L.Kleeman, "Optimal
estimation of position and heading for mobile robots using ultrasonic
beacons and dead-reckoning", IEEE International Conference on
Robotics and Automation, Nice, France, pp 2582-2587, May 10-15 1992.
Abstracts and Papers in Zipped Postscript for Download
- Chong,
K.S. and Kleeman, L. "Indoor Exploration using a Sonar Sensor Array: A
Dual Representation Strategy", Proceedings 1997 IEEE/RSJ International
Conference on Intelligent Robots and Systems.
This paper presents an environmental acquisition strategy for a mobile
robot using an advanced sonar sensor to achieve mapping navigation in
an a priori unknown, imperfectly structured indoor environment. Most
existing feature based strategies rely on unrealistic assumptions about
the environment, while their grid based counterparts hinder
localisation which leads to rapid degradation of map quality. A dual
representation strategy is proposed here which exploits the strength of
both a feature map and a grid map. With the advanced sensor, the
environment is scanned and the obtained features are classified into
planes, corners, edges and unknowns. The feature map is only updated
with the first three types of features. Being sharper and more
realistic than other representations such as uncertainty/bayesian maps,
continual localisation is made possible. The grid map is updated with
all measurements, including the unknowns resulting from complicated
objects, to enable obstacle avoidance. On the grid map, Distance
Transform based exploratory path planning is implemented. Adaptation
has been made so that an explore-local-first behaviour is exhibited.
Processing efficiency is improved with a simple dynamic memory
allocation scheme. The paths generated by the Distance Transform are
validated with a new local path validator that accounts for the
limitation of sonar perception.
- Chong,
K.S. and Kleeman, L. "Sonar Feature Map Building for a Mobile Robot",
Proceedings 1997 IEEE International Conference on Robotics and
Automation.
This report/paper describes a mobile robot equipped with a sonar sensor
array, Werrimbi, in a guided feature based map building task in an
indoor environment. Common indoor landmarks such as planes, corners and
edges are located and classified with a multiple transducer sensor
array. Accurate odometry information is derived from a pair of narrow
unloaded encoder wheels. Discrete sonar observations are incrementally
merged into partial planes to produce a realistic representation of
environment. Collinearity constraints among features are exploited to
enhance state estimation. The map update utilises Julier-Uhlmann Kalman
Filter (JUKF) which improves the accuracy of covariance propagation
through nonlinear equations and eliminates the need to derive Jacobian
matrices. Correlation among map features and robot location are
explicitly represented. Partial planes are also used to eliminate
phantom targets caused by sonar specular reflection.
- Chong,
K.S. and Kleeman, L. "Accurate Odometry and Error Modelling for a
Mobile Robot", Proceedings 1997 IEEE International Conference on
Robotics and Automation.
This report/paper presents a low cost novel odometry design capable of
achieving high accuracy dead-reckoning. It also develops a statistical
error model for estimating position and orientation errors of a mobile
robot using odometry. Previous work on propagating odometry error
covariance relies on incrementally updating the covariance matrix in
small time steps. The approach taken here sums the noise theoretically
over the entire path length to produce simple closed form expressions,
allowing efficient covariance matrix updating after the completion of
path segments. Closed form error covariance matrix is developed for a
general circular arc and two special cases: (I) straight line and (II)
turning about the centre of axle of the robot. Other paths can be
composed of short segments of constant curvature arcs without great
loss of accuracy. The model assumes that wheel distance measurement
errors are exclusively random zero mean white noise. Systematic errors
due to wheel radius and wheel base measurement were first calibrated
with UMBmark [BorFen94]. Experimental results show that, despite its
low cost, our system's performance, with regard to dead- reckoning
accuracy, is comparable to some of the best, award-winning vehicles
around. The statistical error model, on the other hand, needs to be
improved in light of new insights.
- L
Kleeman, "Scanned monocular sonar and the doorway problem", accepted to
IEEE/RSJ International Conference on Intelligent Robots and Systems
1996. (recommended for best paper award by a referee)
A sonar system is presented that relies on scanning a single ultrasonic
transducer and measuring echo amplitude and arrival times. Bearing
angles to targets are estimated far more accurately than the transducer
beamwidth as obtained with conventional sonar rings based on the
Polaroid ranging module. A Gaussian beam characteristic is fitted using
least squares to the amplitudes of corresponding echoes in the scan to
obtain an estimate of the bearing to specular targets. As an
illustration of the information gain over conventional sonar rings, the
sensor approach is used on a mobile robot to find, traverse and map
doorways reliably and with minimal algorithmic effort. This is compared
with other work that claims the problem is difficult to solve using a
conventional sonar ring of 24 Polaroid ranging modules
- H.
Akbarally and L. Kleeman, "3D robot sensing from sonar and vision",
accepted to IEEE International Conference on Robotics and Automation
1996, Minneapolis - recommended for best student paper prize by a
referee. see PDF version above.
We describe a sensor that fuses sonar and visual data to create a three
dimensional (3D) model of the environment with application to robot
navigation. The environment is characterized by a set of connected
horizontal and vertical lines. 3D sonar data is augmented by making
deductions concerning the connection and definition of lines in 2D
visual data. Any errors that may result from incorrect interpretation
of the 2D camera data, such as false connections between lines, can be
detected by moving the robot. Experimental results from the sensor are
presented.
- L.
Kleeman and R. Kuc, "Mobile robot sonar for target localization and
classification", International Journal of Robotics Research, Volume 14,
Number 4, August 1995, pp 295-318.
A novel sonar array is presented that has applications in mobile
robotics for localization and mapping of indoor environments. The
ultrasonic sensor localizes and classifies multiple targets in two
dimensions to ranges of up to 8 meters. By accounting for effects of
temperature and humidity, the system is accurate to within a millimeter
and 0.1 degrees in still air. Targets separated by 10 mm in range can
be discriminated. The error covariance matrix for these measurements is
derived to allow fusion with other sensors. Targets are statistically
classified into four reflector types: planes, corners, edges and
unknown. The paper establishes that two transmitters and two receivers
are necessary and sufficient to distinguish planes, corners and edges.
A sensor array is presented with this minimum number of transmitters
and receivers. A novel design approach is that the receivers are
closely spaced so as to minimize the correspondence problem of
associating different receiver echoes from multiple targets. A linear
filter model for pulse transmission, reception, air absorption and
dispersion is used to generate a set of templates for the echo as a
function of range and bearing angle. The optimal echo arrival time is
estimated from the maximum cross-correlation of the echo with the
templates. The use of templates also allows overlapping echoes and
disturbances to be rejected. Noise characteristics are modeled for use
in the maximum likelihood estimates of target range and bearing.
Experimental results are presented to verify assumptions and
characterize the sensor.
- C.
Y. Chung and L. Kleeman, "Avoiding hazards in self-timed digital
circuits derived from signal transition graphs", Australian
Telecommunications Review, Vol. 29, No. 1, pp. 25-38, 1995.
Since the introduction of Signal Transition Graphs (STGs) in the mid
1980s [1, 2], a number of techniques for the synthesis of self-timed
circuits using STGs have been proposed. To achieve a hazard-free
implementation, restrictions on the structure of the STG have been
employed. Also, hazard-free design techniques have been incorporated
into the synthesis procedure. Despite these, implementations derived
using these techniques are not always hazard-free. Hazards are shown in
this paper to be intrinsic to the function being implemented and cannot
be eliminated. To avoid these hazards, certain timing conditions must
be preserved. Previous attempts [3, 4, 5] to eliminate hazards are
shown to have important limitations. A new procedure is proposed in
this paper for the detection of hazards and timing constraints to avoid
these hazards. The procedure is compared with previous attempts at
hazard detection, and examples presented to show the limitations of
other approaches.
- L.
Kleeman, "A three dimensional localiser for autonomous robot vehicles",
Robotica, Vol 13, No 1 pp 87-94, 1995.
A novel design of a three dimensional localiser intended for autonomous
robot vehicles is presented. A prototype is implemented in air using
ultrasonic beacons at known positions, and can be adapted to underwater
environments where it has important applications, such as deep sea
maintenance, data collection and reconnaissance tasks. The paper
presents the hardware design, algorithms for position and orientation
determination (six degrees of freedom), and performance results of a
laboratory prototype. Two approaches are discussed for position and
orientation determination - (i) fast single measurement set techniques
and (ii) computationally slower Kalman filter based techniques. The
Kalman filter approach allows the incorporation of robot motion
information, more accurate beacon modelling and the capability of
processing data from more than four beacons, the minimum number
required for localisation.
- H.
Akbarally and L. Kleeman, "Sensor data fusion of sonar and visual
data", Australian Robot Association conference "Robots for Australian
Industries" Melbourne July 1995, pp. 288-305.
In this paper we describe a technique that fuses sonar and visual data
to create a three dimensional (3D) environmental model intended for
robotic navigation. The model characterizes the environment as a set of
connected horizontal and vertical lines. Starting with a measurement
cycle from a new 3D sonar sensor, the environmental model is expanded
successively to include lines from a camera view. The 3D sonar data is
augmented by making deductions concerning the connection and definition
of lines in the 2D visual data. Any errors that may result from
incorrect interpretation of the 2D camera data, such as false
connections between lines, can be detected by moving the robot to a
second location. We illustrate the performance of this system by
presenting experimental results from sensing a 3D structure.
- H.
Akbarally and L. Kleeman, "A sonar sensor for accurate 3D target
localisation and classification", IEEE International Conference on
Robotics and Automation 1995, Nagoya, Japan, May 1995 pp. 3003-3008.
See PDF version above.
This paper presents a novel sonar sensor consisting of three
transmitters and three receivers that can localise and classify 3D
targets into 16 different naturally occurring indoor classes. The
sensor produces sub-millimeter range and sub-degree bearing accuracies
using an optimal matched filter time of flight estimator up to a range
of 6 meters. The sensor configuration, hardware and processing are
described. Experimental results from the sensor are presented.
- M.L.Hong
and L. Kleeman, "A low sample rate 3D sonar sensor for mobile robots",
IEEE International Conference on Robotics and Automation 1995, Nagoya,
Japan, May 1995 pp. 3015-3020.
This paper describes an ultrasonic sensor which uses the times of
flight from three Polaroid ultrasonic transducers arranged in an
equilateral triangle to identify and localise planes, 2D and 3D
corners. The sensor employs a Maximum Likelihood Estimator and a data
acquisition system with a low sampling rate of about 59kHz. The
hardware and processing requirements are modest and fast due to the
simple identification algorithms and sensor structure. Localisation of
the objects can be achieved with range error of about 2mm and bearing
error of less than 1°. The sensor has been applied to localising a
robot in a known indoor environment using 3D natural features and has
achieved accuracies of 1cm in position and 2° in bearing.
- L.Kleeman
and R.Kuc, "An optimal sonar array for target localization and
classification", IEEE International Conference on Robotics and
Automation, San Diego USA, May 1994 pp 3130-3135.
A novel sonar array for mobile robots is presented with applications to
localization and mapping of indoor environments. The ultrasonic sensor
localizes and classifies multiple targets in two dimensions to ranges
of up to 8 meters. By accounting for effects of temperature and
humidity, the system is accurate to within 1 mm and 0.1 degrees in
still air. Targets separated by 10 mm can be discriminated. Targets are
classified into planes, corners, edges and unknown, with the minimum of
two transmitters and two receivers. A novel approach is that receivers
are closely spaced to minimize the correspondence problem of
associating echoes from multiple targets. A set of templates is
generated for echoes to allow the optimal arrival time to be estimated,
and overlapping echoes and disturbances to be rejected.
- C.
Y. Chung and L. Kleeman, "An optimal approach to implementing
self-timed logic circuits from signal transition graphs", Australian
Telecommunications Review, Vol 27, No. 2, pp. 41-56, 1993.
Scaling of integrated circuits in recent years has resulted in
improvements in speed and density of VLSI circuits. However scaling has
also aggravated clock skew problems due to increasing wire delays.
Consequently, to exploit the speed improvements of scaling and to avoid
synchronisation failure in synchronous systems, designers are now
turning towards self-timed system design for solutions. Amongst the
techniques for the synthesis of self-timed circuits, an approach using
Signal Transition Graphs was introduced by Chu [1, 2, 3]. In an attempt
to simplify his method and to achieve efficient results, he uses a
procedure called net contraction to decompose a Signal Transition Graph
into simpler subgraphs known as contracted STGs. With the possibility
of state assignment problems in the contracted STGs, net contraction
introduces complications and inefficiencies. The cause of these
deficiencies can be shown to be the criterion upon which a signal is
retained during net contraction. To avoid these deficiencies, a new
approach is presented that derives circuit implementations from
uncontracted state graphs using Quine-McCluskey tabular Karnaugh
mapping and Prime Implicant tables. This approach is shown to produce
hazard free implementations with a minimum number of gates in contrast
to Chu's sub-optimal method.
- L.Kleeman,
"Optimal estimation of position and heading for mobile robots using
ultrasonic beacons and dead-reckoning", IEEE International Conference
on Robotics and Automation, Nice, France, pp 2582-2587, May 10-15 1992.
An active beacon localisation system is described that estimates
position and heading for a mobile robot. An Iterated Extended Kalman
Filter is applied to the beacon and dead-reckoning data to estimate
optimal values of position and heading, given a model for the localiser
and robot motion. This paper describes the implementation and
experimental results of the localisation system. Position and heading
angle updates are calculated in real time every 150 milliseconds with a
measured standard deviation of path error of 40 mm in a 12 metre square
workspace.
Hockey
1978-1983 Newcastle
Uni and intervarsity rep.
2007 onwards with Doncaster
hockey club. Best
and fairest Vet C 2008 scoring ~1 goal per match.
Highlights
Doncaster versus Kew 2009.
Department
of Electrical and Computer Systems Engineering | Faculty of
Engineering | Monash
University
Last updated : 2016
|


{kind=link}
{kind=link}
{kind=link}
{kind=link}