| |
Videos Conferences and Journals The following section contains videos from conference papers and journal articles written by IRRC members.
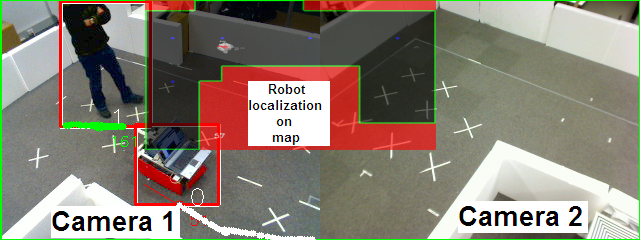 | External Cameras & A Mobile Robot: A Collaborative Surveillance System
by Punarjay Chakravarty and Ray Jarvis
Abstract
Video Link
|
ACRA 2006 Videos
 | The
video illustrates experiments performing congregation and light seek behaviours using two different chemicals. Initially, the robot leader broadcasted methylated
spirits and the others robots started to search and localize the robot leader. When the robots sensed a high level of chemical concentration, the congregate behaviour
was executed. The robot leader then broadcasted eucalyptus oil and the robots started to execute the other command and search the light source.
(ICARCV 2006
paper, Anies and Andy)
Two Chemicals Video (4.4MB)
|
Past conferences (2005 or older)  | Video based on "Interactive SLAM using advanced
Sonar and Laser range finder", ICRA 2005 paper by Albert Diosi, Geoffery Taylor and Lindsay Kleeman.
It shows a robot following a human guide, while mapping
the environment. Then, the robot navigates autonomously based on verbal commands.
Short Video (1.9MB)
Long Video (5.7MB)
|  | The video illustrates experiments exploring congregation behaviour
that resulted from projecting chemical plume in different directions. With the drop in chemical concentration when the robot leader was moved to another place the
other robots started to search the new location of the robot leader. The robots then congregated at the locations directed by the robot leader.
(ACRA 2005 paper, Anies and Andy)
Congregation Behaviour Video (12.9MB)
|
 |
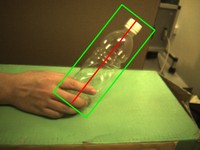
Video illustrates the tracking capability of the template matching sonar system
that estimates range and bearing to reflectors. The paper describing this work won the Nakamura Prize for Best Paper at IROS'99
L. Kleeman, "Fast and accurate sonar trackers using double pulse coding", IEEE/RSJ International Conference on Intelligent Robots and Systems,
Kyongju, Korea, October 1999, pp.1185-1190.
See Associate Professor Lindsay Kleeman's online publications for more details.
Short Video (553KB)
|
Robot Systems and Demonstrations  | Sonar tracking a
stationary plane target whilst the robot moves under joystick control. See Associate Professor Lindsay Kleeman's online
publications for more details.
size: 839k | 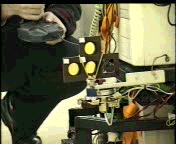 | Closeup of sonar tracker in
action. See Associate Professor Lindsay Kleeman's online publications for more details.
size: 428k
|  | Robot moving autonomously avoiding obstacles using a
SICK laser range finder and simultaneously tracking with front and back sonar systems. See Associate Professor Lindsay Kleeman's online
publications for more details.
size: 490k
|  | Robot moving along a corridor avoiding obstacles with
sonar searching and tracking walls either side. See Associate Professor Lindsay Kleeman's online publications for more
details.
size: 626k
|  | View from above of robot moving along a corridor
avoiding obstacles with sonar searching and tracking walls either side. See Associate Professor Lindsay Kleeman's online publications
for more details.
size: 626k
|  | Etherbot is capable of autonomous navigation in
initially unknown environments and is controlled via a radio ethernet link (Ray Jarvis).
size: 1058k
|  | Using a toy as a master controller this excavator can
be fully teleoperated (Ray Jarvis).
size: 690k |  | Two 6 DOF fingers with
tactile shape and force sensing manipulate a block. Each finger is positioned by a Stewart Platform mechanism. (Andy Russell)
size: 1017k |  | Biologically inspired robots
following a heat trail deposited by the leading pudding bowl robot. (Andy Russell)
size: 818k |  | This Russian built Marskohod
model is being used to study natural landmark based autonomous navigation in very rough terrain (Ray Jarvis).
size: 1067k |  | The rear vehicle follows the
lead vehicle at a fixed distance (Ray Jarvis).
size: 671k
|  | This is a ‘video plane’ swarm of small robots
cooperating to move some objects (Ray Jarvis)
size: 1215k
|  | This 1000kg tracked unit can operate in autonomous or
teleoperational modes using phase mode/differential GPS localisation and radio ethernet communications with a home base computer (Ray Jarvis).
size:
1824k
| 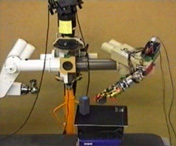 | Shows the metalman humanoid making towers
out of coloured blocks using visual servoing from active stereo cameras. This work has been done by Geoff Taylor, supervised by A/Prof Lindsay Kleeman
size: 3.6MB
|
Lego Robots Competition The following larger clips are from our third year undergraduate design subject ECE3905. These clips show Lego robots competing to gather
"meteorites" (red balls) and deliver to the robot's home base whilst avoiding the "rocks" (blue balls). rules.mpg (5.5 Mbytes)
rules.rm (0.5 Mbytes) (smaller RealPlayer file)
dougy.mpg (3 Mbytes)
dougy2.mpg (1 Mbyte) Delivering blue balls to oponent's base.
nemo_versus_elite.mpg (3 Mbytes)
doggy_versus_lepper.mpg (1.5 Mbytes)
doggy_versus_lepper2.mpg (2 Mbytes) | |
|